
Шаговые двигатели имеют свою специфику, в силу которой они получили широкое применение для приводов дисководов, принтеров, автоматических инструментах и других приборов, где требуется высокая точность исполнения операций. В этих условиях, для обеспечения необходимой функциональности того или иного устройства, требуется качественное управление шаговым двигателем.
Свойства шагового двигателя
Все двигатели такого типа могут работать в широком диапазоне угловых разрешений. Если в более грубых моторах с большими размерами вращение происходит примерно на 90 градусов за один шаг, то в шаговых электродвигателях этот показатель равен от 0,72 до 1,80.
При наличии качественного контроллера, можно использовать еще более мелкие шаги так называемые полушаговый и микрошаговый режимы. В это время на обмотки происходит подача дробных значений напряжений, которые формируются с помощью специальной ШИМ-модуляции.
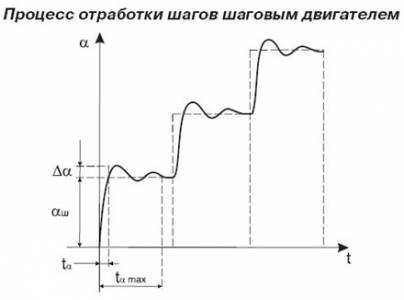
Если при управлении возбуждается только одна обмотка, то поворот ротора будет фиксированным, на определенный угол. Его значение будет удерживаться, пока не наступит превышение внешнего момента над моментом, удерживающим двигатель в точке равновесия.
Способы управления
Биполярный шаговый двигатель управляется электрической схемой, с помощью которой выполняется изменение скорости, старт, стоп и реверс. Все цифровые переключения последовательно транслируются в движение. Переключающиеся напряжения на обмотках, обеспечивают так называемое вращение магнитного поля. После него, происходит вращение ротора, который соединяется с выходным валом двигателя с помощью редуктора.
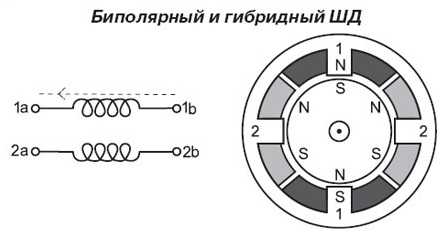
Каждая обмотка должна быть обеспечена мостовой схемой, позволяющей производить качественное управление шаговым двигателем и независимую замену полярности напряжения во всех обмотках. Физические возможности каждой модификации электродвигателя определяют максимальную скорость движения. Регулировку скорости можно производить, изменяя размер шага до необходимых значений. То есть, чем больше шаги, те выше и скорость движения.
Все системы, управляющие электроприводами, пользуются датчиками обратной связи, которые позволяют отработать заданный угол или перемещение, в соответствии с положением или углом выходного вала двигателя. Если допускается использование синхронного шагового электродвигателя, то датчик обратной связи можно не применять. Таким образом, схема управления значительно упрощается, ускоряя процесс работы устройства в целом.