
В регулируемых приводах различных устройств уже на протяжении длительного времени применяются трехфазные электродвигатели синхронного и асинхронного типа. Чаще всего применяется асинхронный вариант, в котором для регулировки используются полупроводниковые частотные преобразователи.
Для того чтобы обеспечить плавное регулирование и быстроту действия существует специальная схема частотного преобразователя асинхронного двигателя.Таким образом, управляющие устройства осуществляют непрерывную регулировку в быстром режиме.
Назначение и принцип работы частотного преобразователя
Стандартный частотный преобразователь является специальным электротехническим устройством. С его помощью асинхронным двигателям обеспечивается плавный пуск и остановка, а также возможность изменения скорости, крутящего момента и других производственных характеристик. Кроме этого, преобразователь контролирует показатели параметров для всех процессов, происходящих в двигателе. Одновременно контролируются и технологические процессы.
Применение преобразователей позволяет существенно увеличить время непрерывной работы асинхронных двигателей и значительно экономить электроэнергию. Операторы постоянно используют обратную связь при наблюдении за приводами во время работы. За счет этого снижается вероятность возникновения аварийных ситуаций. По сравнению с механическими регулировочными приспособлениями частотный преобразователь позволяет довести КПД до 96-98%.
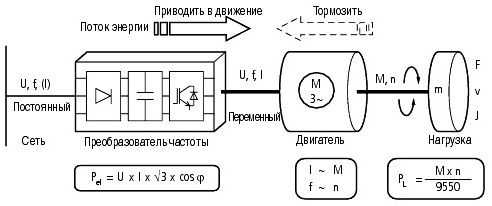
В некоторых видах частотных преобразователей имеются промежуточные преобразующие звенья. Поэтому вся конструкция прибора может быть одно- или двухступенчатой. Во втором случае преобразование электроэнергии производится дважды. Этот вариант получил более широкое распространение. Здесь происходит преобразование переменного тока в постоянный, после его прохождения через выпрямитель. Затем, преобразованный ток поступает в инвертор, где происходит конвертация в обратную сторону. Таким образом, скорость вращения ротора регулируется за счет изменения частоты и напряжения электрического тока на входе.
Управление электродвигателями осуществляется векторным и скалярным способом. Первый вариант отличается более высокой точностью и эффективностью. Этот способ достаточно дорогой, сложный в обслуживании, требующий от специалистов полного объема знаний и навыков. Во втором случае обслуживание управления гораздо проще, а сам частотный преобразователь значительно дешевле. Он применяется в механизмах, где выходные параметры не требуют точной регулировки. Тем не менее, плавный пуск обеспечивается также качественно, как и при векторном управлении.
Общая схема частотного преобразователя
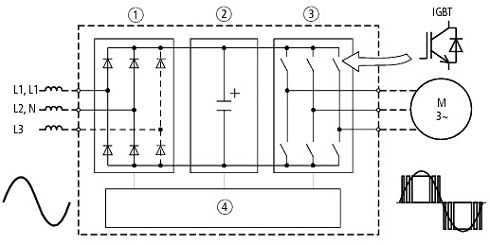
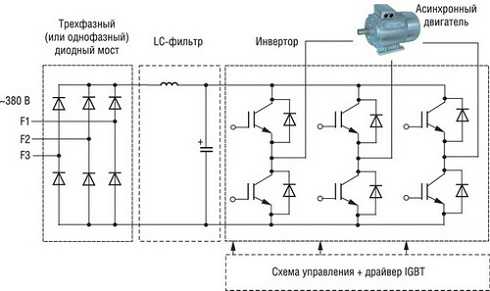
Конструкция стандартного преобразователя включает в себя неуправляемый силовой диодный выпрямитель, автономный инвертор, система управления и автоматической регулировки, а также дроссель и конденсатор фильтра. Выходная частота и напряжение регулируется с помощью инвертора, в котором применяется широтно-импульсное высокочастотное управление. При этом, возникает определенный период модуляции, во время которого происходит поочередное подключение обмотки статора к положительному или отрицательному полюсу выпрямителя. Продолжительность такого состояния происходит в соответствии с синусоидальным законом.
Во время регулировки скорости, скольжение асинхронного двигателя не увеличивается. За счет этого удается избежать потерь мощности. Подводимое напряжение подвергается изменениям совместно с частотой. Поэтому удается получить высокий коэффициент мощности, КПД, способность к перегрузкам и другие энергетические показатели, характерные для асинхронных двигателей.
Чаще всего схема частотного преобразователя асинхронного двигателя построена на принципе двойного преобразования. Для выпрямления входного синусоидального напряжения используется звено постоянного тока. После этого происходит сглаживание фильтром, включающим в себя конденсатор и дроссель. Затем, при помощи инвертора, производится еще одно преобразование, после которого постоянная амплитуда и частота напряжения становится изменяемой, с необходимыми параметрами.

Необходимые параметры частоты и напряжения на выходе регулируются широтно-импульсным управлением высокой частоты. В это время происходит модуляция продолжительности поочередного подключения обмоток к каждому из полюсов выпрямителя. В средней части полупериода ширина импульсов становится максимальной, а в начале и конце каждого полупериода наступает их уменьшение. Именно таким путем и обеспечивается регулировка напряжения, поступающего на обмотки асинхронного двигателя. Для изменяемой амплитуды и частоты на выходе устанавливаются все необходимые параметры.